UCL Rover Team Experience
The UCL Rover Team is a student-led organisation of around 20 selected students, dedicated to designing, building, and testing a rover for the annual European Rover Challenge. Bringing together students from mechanical engineering, computer science, electrical engineering, biomedical engineering, and other disciplines, the team focuses on creating innovative robotic systems capable of performing designated tasks. Now in my third year on the team, I spent my first two years working on the Science Cache—where I eventually became the subsystem lead—before moving into the Robotic Arm team to take on new challenges and broaden my experience. Through hands-on engineering, collaboration, and a shared passion for discovery, the UCL Rover Team continues to develop its capabilities while showcasing the technical excellence and creativity of UCL. Below is the video submitted for the 2024 ERC competitions:
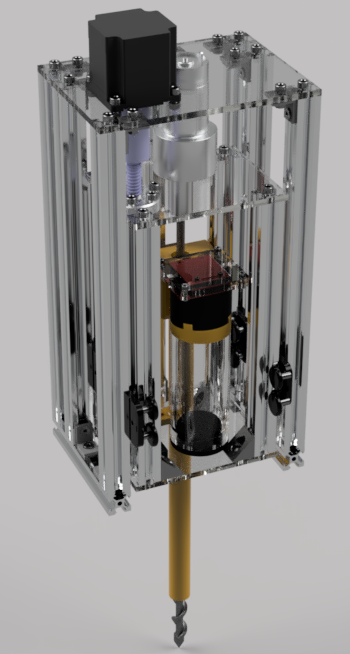
Science Cache
During my time as the Science Cache subsystem lead, I designed and built a mechanism capable of extracting, weighing, and analysing regolith and soil samples within a team of 2. The system used an auger drill capable of reaching depths of up to 30 cm, and incorporated a load cell that provided sample mass measurements with 0.1 g accuracy. We also integrated an Adafruit spectroscopy sensor to capture detailed chemical and mineral data from the extracted samples. To ensure precise movement and alignment during drilling and sampling, we developed a double lead-screw gantry system, which provided stable and repeatable positioning across the full operating range. Our final design met three key European Rover Challenge regulations, demonstrating its accuracy, reliability, and suitability for scientific field tasks. The subsystem consists of an outer and inner frame: the outer frame mounts to the rover via an onboard C-Beam, while the inner frame houses the auger drill, the load-cell container, and the spectroscopy sensor. Images of the subsystem design—both as a standalone unit and integrated onto the rover—can be seen below.

Robotic Arm
After completing my year in industry, I joined the UCL Rover Team’s robotic arm sub-team, where my primary focus is developing a harmonic drive mechanism for the elbow joint to improve precision and reduce backlash. I also aim to integrate visual servoing capabilities using the ROS 2 control stack I began building as a personal project over the summer. This system—currently under active development—is available on my GitHub under the project title 'Visual Servoing Arm'. The current arm design, shown below, includes a cycloidal gearbox, which introduced a small amount of backlash during last year’s operations. My work this year focuses on addressing these limitations and improving the arm’s accuracy and reliability.
London Youth Robotic Conference 2023
During the summer of 2023, alongside three other engineers from the team, we were invited to showcase UCL's Mars Rover at the first-ever London Youth Robotics Conference held at St Paul’s Girls’ School. Images from the event are shown below: